【ROBOTECH2011】宇都宮大学尾崎研の
イチゴ摘みロボットは昼間から摘み取り作業可能
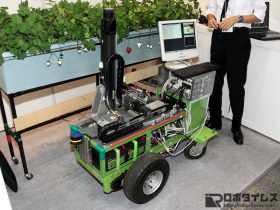
つくばチャレンジに、「磁気ナビゲーション法」という、一般的なレーザーレンジファインダではなく外界環境の情報取得方法を用いたロボットで参加し、2009年の参加の時は1kmの完全自律走行を達成した宇都宮大学工学機械知能工学専攻機械システム工学科計測・ロボット工学研究室教授の尾崎功一氏。ROBOTECH2011では、「イチゴ摘みロボット」を出展、デモンストレーションを行った。ちなみに、同ロボットのサイズは全長120cm×全幅68cm×全高120cmで、重量は200kg。
イチゴ摘みロボットは地元企業、栃木県、宇都宮大学の産官学コンソーシアム事業で開発されており、平成17年度から開発が継続中だ。平成21年度からは農水省の実用化事業の高品質イチゴのロバスト輸送システムの開発にイチゴ収穫ロボットとしても導入されている。なお、イチゴロボットは各所で開発が行われており、第4回ロボット大賞でサービスロボット部門優秀賞を受賞した独立行政法人・農業・食品産業技術総合研究機構などが開発した「イチゴ収穫ロボット」とは完全に別のロボットである。
イチゴ摘みロボットの最大の特徴は「視覚」だ。温室は日当たりがいいため、照度が大きく変化するという、画像認識を行うには厳しい条件を有している。しかも、イチゴそのものが葉の陰にできることも普通だ。こうした環境下で確実にイチゴを摘み取るには、正確に赤色を評価できることがまず重要だが、同時に照度変化に対して感度を鈍くないとならないという相反する要素も必要である。正確さと同時に鈍感さも併せ持って初めて、日中でも正確にイチゴを摘み取れるというわけだ。

尾崎氏によれば、現状でイチゴ摘みを完全にロボット化するのは難しいが、稲のように品種改良を行うことで、かなり進展するという。実際、稲の田植えは機械で行われているわけだが、実は機械による田植えを行いやすいように品種改良が行われているという。イチゴの場合も、ツルがもっと長く伸びるようにすれば、カッティングがしやすくなるというわけだ。現状、人の手で摘んでいてもイチゴそのものに手が触れないことはないそうだが、触れてしまうとそこからいち早く痛んでしまうということで、イチゴ摘みロボットならイチゴそのものに触れずに収穫できるので、ロボット化の余地は大いにあるというわけだ。また、マーケットとしてまず目指しているのは高級イチゴだそうである。