【ROBOTECH2011】人工知能開発のブレイクスルーか!?
明治大武野教授の未知の世界を学べるロボット「アンノン」
明治大学理工学部情報科学科ロボット科学研究室教授の武野純一氏は、「意識するロボット」の開発を進めている研究者だ。今回、武野氏の研究室が出展したのは、“未知の世界を学習できるロボット”の「アンノン」。正確にはロボットのハードとソフトの両方ではなく、未知の情報に対応できるプログラムを開発したという形だ。「学習している内容については行動できるが、未学習の内容については何も行動できない」というロボットの問題点を解決した、2011年11月にアメリカの国際会議BICA2011で公表が予定されている最新の研究内容を応用したものである。人工知能開発および人の意識の解明に関してブレイクスルーとなる可能性を大いに秘めた理論が応用されているソフトウェアなのだ。
メモリ容量などがロースペックの学習教材用のロボットを利用していることから、今回のデモでは知らない「色」を検知した時に「知らない」と認識して新たな色として覚え、それに対応するアクション(左に30度回転する)を行うという内容だ。最初から情報として与えられている緑色を見せられた場合は前進、青色の場合は後退、赤色の場合は停止の3色以外に、紫を見せると知らない色と判断して「知らないことを伝え」、新たに覚えて前述の新アクションを割り振って次にその色を見せられ時は左に30度回転してみせるというわけである。
この「未知の情報を発見して、それを新たな情報として学習できる」仕組みは、武野氏が2005年に開発した“意識モジュール”の「MoNAD」をベースにしている。MoNADは、人間や猿などの高等な霊長類の脳内にあることが発見されてまだ新しいミラーニューロンの原理を用いて開発され、これまでモジュールを階層化して“意識システム”を構築し、ロボットによる「ミラーテスト」(鏡像認知の実験)にも成功している。今回のデモンストレーションは、“二重の再帰ニューラルネットワーク”で構築されているMoNADの内部で起こる情報の循環に着目し、「既に学習済みであればその情報の収束が早い」ことと、「未学習であればその情報の収束が停滞する」という現象を利用して開発された。
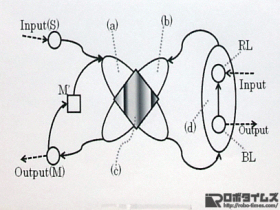
この二重の再帰ニューラルネットワークこそが、実は「人の意識とは何か」と人工知能開発のブレイクスルーになり得る新たな理論のベースとなるもの。詳しくは画像を見ていただきたいが、インプット(情報)とアウトプット(行動)の情報の流れが途中で交錯している上に、アウトプットの流れが再び情報側にフィードバックされる仕組みを持っており、これを武野氏は「行動と認識の一貫性」とも呼んでいる。どういうことかというと、「意識とは自分の行動を認識できること」というわけだ。人は、「自分が何をしているか」や「自分がどこにいるか」ということを意識できるわけだが(おそらく、かなり下等な動物も人よりは単純になるだろうが、自分が何をしているかはわかっているはず)、これを実現できる仕組みが「行動と認識の一貫性」の二重の再帰ニューラルネットワークなのである。逆に、従来のコンピュータを搭載したロボットは、当然この仕組みを持っていないため、GPSなどを利用して位置情報を取得して問いただされたら座標を返すといった反射行動は可能だが、人のようには自分がどこにいるかは認識できないというわけだ。
二重の再帰ニューラルネットワークは脳内の情報の流れとして非常にシンプルに感じる。おそらく、読者の方の中にはこうした理論はこれまでいくらでも誰かが提唱しているだろう、と思う方もいるかも知れない。しかし、実は誰も提唱していなかったのである。しかもこのシンプルさは、ズバリ真実を突いている可能性を感じないだろうか。なお、武野氏は脳科学や意識に関する研究の発展に寄与できると考えていると同時に、人工知能の開発も発展させられるだろうという。しかも、コンピュータが意識を実際に持つ可能性もあり、場合によっては映画「ターミネーター」的な機械の反乱にもつながってしまうかも知れないとまで考えている。いわれてみれば簡単といういわゆるコロンブスの卵的であり、オッカムの剃刀でいうところのシンプルであるが故に真理ではないかとも強く感じられ、この研究がどう発展するか要注目である。