ヴイストンの新製品3機種の最後の「4WDSローバー」は
4輪独立操舵駆動式全方位移動台車型ロボット
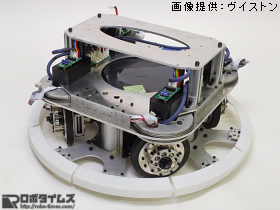
7月12日に発表された、ヴイストン株式会社の台車型ロボットプラットフォーム3機種。最後は、4輪独立ステアリング駆動式全方位移動台車型ロボットプラットフォーム「4WDSローバー」だ。4輪すべてを独立して操舵できると同時に、4輪すべてが駆動輪でもあり、全方位への移動が可能となっている。
特徴は、まずステアリングが滑りなどの位置ズレなしで全方向の方向転換と移動を行なえることがひとつ。15mmのストロークを持つサスペンションを備えているので常に4つのタイヤが地面に設置しており、高い直進性も実現している。また、静音性の高いタイヤを利用している点も特徴だ。可搬重量は、先に紹介した「メガローバー」(記事はこちら)と「オムニローバー」(記事はこちら)と同じ40kg。最高速度はオムニローバーよりも若干遅い、秒速1000mm/s=時速3.6kmとなっている。
そのほか搭載CPUが「VS-WRC103LV」であること、「VS-WRC103LV SDK」を利用すれば、PCからの制御が可能なこと、開発ツール「LPCXpresso」によるC言語でのプログラミングを行えることなどはオムニローバーと一緒。そのほか、インターフェースや付属品、オプションはすべてオムニローバーと同じだ。オムニローバーと異なるのは、DCブラシレスモータの出力で、70W。個数は4個だ。
価格はオープン。サイズは全長が42cmとメガローバーと同じだが、全幅は37cmとオムニローバーと同じ。全高はどれよりも高く27cmとなっている。