「ビュートローバー」でものづくり、プログラミングを学ぼう!
第1回:ビュートローバーと著者紹介!(前編) 近藤道隆
【著者自己紹介:近藤隆路とはこんな人間です!】
この度、ロボタイムズにてビュートローバーによるものづくりとプログラミング学習の記事を執筆させていただくことになりましたた、大阪工業大学ものづくりセンター(MONOLAB.)の近藤隆路と申します。90年代前半、小学生の頃にロボット、そしてロボットコンテスト=ロボコンへの興味を持ちまして、2002年に今は自分が働いている大阪工業大学に進学してからは、数々のロボコンに参加してきました。
そんな自分がこのような機会をいただき、心を躍らせながらキーボードを叩いております。なにぶん文章を書くことが本業ではないため、読みづらい部分もあるかと思いますが、ビュートローバーのプログラミングだけでなく、ロボットの楽しさなども伝えていければと思っています。どうか最後までお付き合いのほど、よろしくお願いいたします。なお、今回はプロローグの第1回の前編ということで、まずはビュートローバーがどんなロボットなのかということと、今後の連載の予定に触れてみたいと思います。
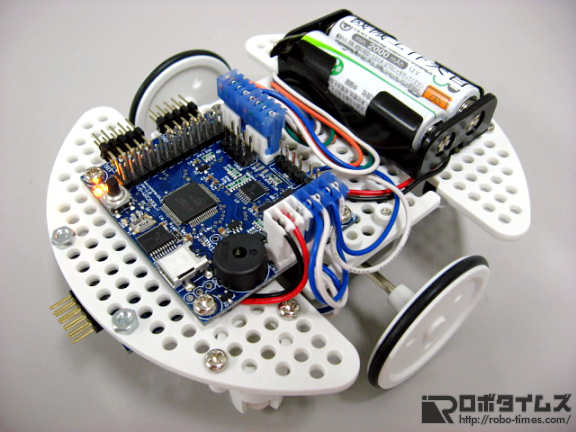
【ビュートローバーとはヴイストン製のプログラミング学習教材用車両型ロボット】
ヴイストン株式会社製「ビュートローバー」は、ルネサス エレクトロニクス株式会社製マイコン「H8/36064G」、もしくはARM社製「Cortex M3」コア搭載のNXPセミコンダクターズジャパン株式会社製マイコン「LPC1343」を搭載したプログラミング学習教材用車両型ロボットです(「ビュートローバーH8」もしくは「ビュートローバーARM」として販売中です)。ロボットの組み立て、プログラムのアルゴリズムの製作など、ものづくりを体験するための入門から、C言語を使ったH8マイコンのプログラミングの高度な勉強まで、幅広いことを楽しみながら学ぶことができるのが特徴のロボットとなっています(記事はH8版がこちらで、ARM版がこちら)。
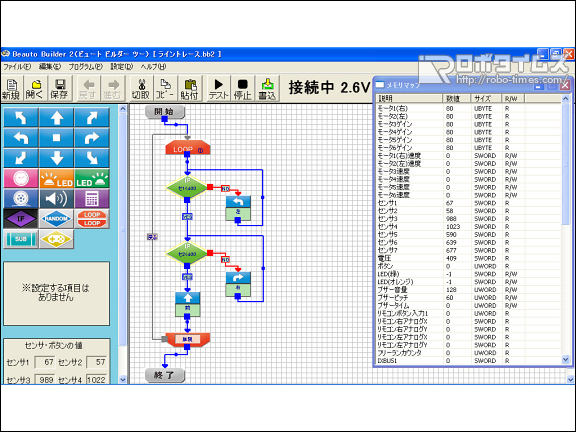
ビュートローバーは2通りのプログラミングができることも大きな特徴です。キットに付属しているビュートローバー対応のWindows用ソフトウェア「Beuato Builder2」(右の画像)を使えば、とても簡単にプログラミングできます。直進やLED点灯、センサー入力による条件分岐といったブロックを画面上に置いていき、それらをつないでフローチャートを作成するだけで、ビュートローバーのプログラムになるのです。
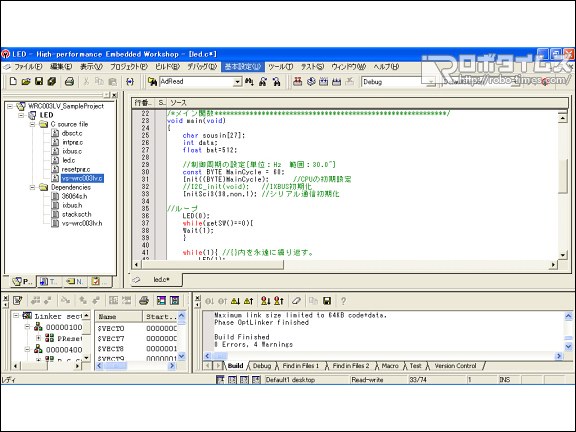
さらにビュートローバーのプログラミング環境としては、上級者用なのですが、ビュートローバーH8(以下、H8版)の無償の統合開発環境「HEW」(左下の画像)と、ビュートローバーARM(以下、ARM版)の「LPCXpresso」も用意されています。これらを利用することで、C言語での本格的なプログラミングも可能です。両ソフトともヴイストンのホームページからダウンロードができます(編集部注:今回の連載では、H8版で解説します)。
Beauto Builder 2を使いながらロボットの制御やセンサーによる計測と情報処理の基礎をまず学び、それからC言語へのステップアップを行えるという仕組みになっているのです。そういった点から、ものづくりやプログラミングを学べる入門機としてオススメのキットというわけです。
【全8回を予定している連載の内容】
今回の連載は、全8回を予定しています。それに先立ち、予定している内容を簡単にご紹介させていただきます。(編集部注:文章量の都合上、各回を2~3回に分けて掲載する形になります)
●第2回 ビュートローバーを組み立ててみよう
まずは、ビュートローバーを組み立ててみます。H8版もARM版もCPUボードの搭載CPUが違うだけで、作り方に違いはありません(性能的にも大きな違いはありませんが、上級者向けの開発環境は前述したように異なります)。プラスの2番ドライバーとニッパーを用意してもらって、制作開始となります。なお、この記事は、私の生徒のひとりである大阪工業大学の学生の播田が担当しています。
●第3回 Beauto Builder2によるプログラミング
本体が完成したら、いよいよプログラミングの開始です。まずは基本からということで、C言語は使わず、付属ソフトのBeauto Builder 2を使ってプログラムを作ってみます。冒頭でも説明しましたが同ソフトはマウスクリックだけで簡単にプログラムを作ることができます。まずは初心者向けのこのソフトを使って、プログラムの流れ、つまりアルゴリズムを作る練習をしてみましょう。こちらの記事は、やはり教え子の金沢が担当しています。

●第4回 ビュートローバーでC言語の基礎を学ぼう
C言語によるプログラミングを行うための開発環境HEWの準備から、ビュートローバーの基礎的なC言語による制御までを学びたいと思います。この章で使うC言語の作法は、if文とwhile文という最低限のものに絞り、LEDの点灯、モーターの回転、ブザーを鳴らす、センサの値を読み込むなど、ビュートローバーを動かすための最低限の内容にチャレンジしてみましょう。
●第5回 ビュートローバーとPCを通信させよう
ロボットとPCが通信するって、なんかカッコよくないですか? ビュートローバーには液晶ディスプレイなどの表示装置がついていませんので、本体内部で何が起こっているのかがわかりません。PCと通信し、画面にビュートローバー内部の情報を表示させることにより、情報をより詳しく分析することができるというわけです。また、PCから指令を送ることで、キーボードからビュートローバーを制御するというようなことにもチャレンジしていきたいと思います。ビュートローバーとPCが連動している様子は、こちらです(動画02)
●第6回 ビュートローバーを使ってC言語を練習しよう
C言語にはさまざまな文法や作法があります。ビュートローバーを使ってC言語のfor文や、switch文、break文などの文法や、配列の使い方、関数の作り方などを学んでいきたいと思います。ビュートローバーを使ってC言語を勉強したい方が、十分満足いただける内容を目指していきます。もちろん、開発環境のHEWを活用する内容で進めていきます。

●第7回 ビュートローバーを改造して遊ぼう
ビュートローバーにはさまざまなオプション部品が用意されています。無線コントローラを搭載してビュートローバーをラジコン化したり、ロータリーエンコーダー(車輪の回転数などを利用して移動距離を計測するセンサの一種)を搭載して走った距離を測定するなど、さまざまなオプションパーツの制御をC言語でチャレンジしていきたいと思います。
●第8回 ビュートローバーを使い倒そう!
実はビュートローバーに搭載されているCPUボード「VS-WRC003LV」には、まだまだすごい可能性が秘められています。LEDを増設したり、ビュートローバー用赤外線センサ以外のセンサを搭載したりと、盛りだくさんの内容でお送りしたいと思います。その様子を収めた動画は、こちらとこちらです。
なお、私が記事を執筆することを決意した理由ですが、ものづくり教育に携わる立場として、少しでもものづくりを学びたい人の助けになりたい、そしてものづくりの楽しさを知ってほしいという思いがあるからです。進路に悩んでいるみなさん、ものづくりやプログラミングに興味があれば、今回の連載をきっかけにしていただき、ちょっとだけ技術者への扉を開いてみませんか? この連載が、これからものづくりやプログラミングに挑戦したいと思っている小中高生、大学生のみなさんの第一歩のきっかけになれば幸いです。もちろん社会人のみなさんや、すでにロボットを楽しんでいるホビーストの方々にも、面白いと思っていただけるような情報を随所に盛り込んでいけるよう努力したいと思いますので、楽しみにしていてください。
第1回後編では、自分が小学生の頃と比べて、どれだけ現在はロボット製作しやすくなっているか、どれだけロボットの競技会やコンテストが増え、そして小学生でも参加できるような環境が整ってきたかといったことを紹介していきたいと思います。