「ビュートローバー」でものづくり、そしてプログラミングを学ぼう!
第2回:ビュートローバーを組み立ててみよう!(後編) 播田将樹
大阪工業大学ものづくりセンター(MONOLAB.)の近藤隆路に代わり第2回を担当しております、大阪工業大学ロボット工学科2回生の播田将樹(はりた まさき)です。「ビュートローバーでものづくり、そしてプログラミングを学ぼう!」の第2回「ビュートローバーを組み立ててみよう!」の後編、本体製作編に行ってみたいと思います。今回、最後までがんばってもらえれば、いよいよあなたのビュートローバーが走れるようになります!
【機体作成開始!】
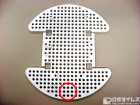
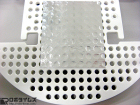
まず最初は、ユニバーサルプレート(以下、プレート)にポールキャスタ(以下、キャスタ)を取り付けます。取り付ける位置ですが、プレートの穴が一部◎になっているので、それで確認できます(画像01)。位置がわからない時は、画像を参考にしてくださいね。取り付けが完了したら(画像02)、プレート上(キャスタがある側の裏面)にアルミシートを張ります(画像03)。
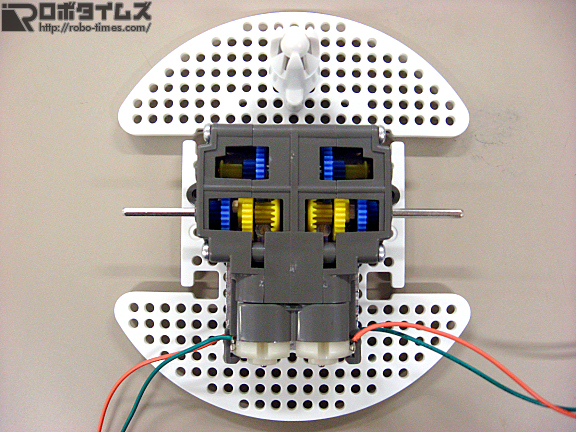
プレート側の準備が整ったら、前回作ったギヤボックスを早速取り付けにかかります。これも目印があるので、「どこに取り付けていいかわからない!」なんてことはありません(画像04)。わからない時は、ポールキャスタの取り付け同様、画像を参考にしてください。
ギヤボックスの取り付けが終わったら、次はタイヤの装着になります。ギヤボックスのモータの六角シャフトに取り付けていきます。タイヤの取り付け方に関する注意点は、奥までしっかりとはめ込むというところです。ちょっと力がいるかも知れません(画像05)。
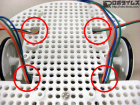
続いて、センサの取り付けです。だんだんとロボットらしくなってきましたよね! センサはキャスタの両脇に取り付ける形になります(画像06)。センサもちゃんと取り付けるための目印がプレートに記されていますので、安心してください。センサからは配線が出ているのですが、この取り回しをちゃんとやらないと邪魔になってしまうので注意しましょう。プレートのタイヤのそば前後合計4ヶ所に口の時になっているところがありますので、そこを通すようにします(画像07)。これで半分ができました。後もう少しなのでがんばりましょう!
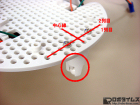
次は、もうひとつのキャスタを取り付けます。こちらも例によって、目印があるので大丈夫……、と思ったらなんとありません! なので、プレートの穴の列の後ろから二列目の中央に装着してください(画像08)。注意すべき点は、ひとつ目のキャスタとは取り付け角度が違うところです。
今度は電池ボックスを取り付けます。取り付け方は、電池ボックスの取り付け位置が前方に来るようにビュートローバーの本体を置いて、電池ボックス内の長い穴の方が左に来るようにして行います(画像09)。
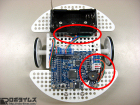
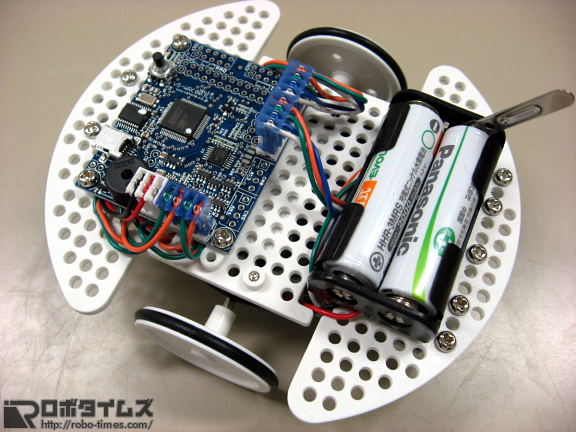
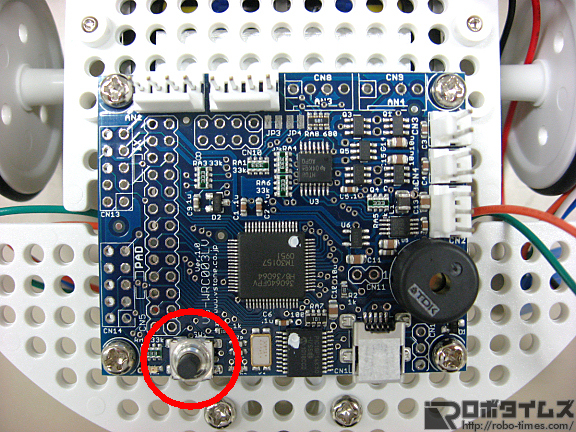
そして、ついに取り付け最後の大物、CPUボードです! もちろん、みなさんもおわかりでしょうけど、これはいわゆる人間でいうところの脳みそですので、丁重に扱ってください(画像10)。CPUボードのセット位置は、電池ボックスのある側とは反対になる車体後部側。気をつける必要があるのは、スタートスイッチが後部側になるように取り付ける点です。CPUボードの取り付けが完了したら、ビュートローバーのボディの完成です(画像11)! でも、まだこれで完成ではないので、気を抜かないでくださいね。
【配線の接続でいよいよ本体が完成!】
続いては、最後の行程となるコネクタへのケーブルの接続です。人間でいえば、神経とか血管を接続するような感じでしょうか。とにかく、センサやモータ、電池ボックスなどをCPUボードとつなぐことで、ビュートローバーはロボットとしてハードウェア的に完成するのです。
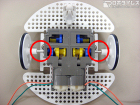
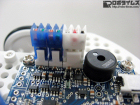
それでは参りましょう! まずは、センサの接続からです。スタートスイッチの正面、左のタイヤのそばに4本ピンの白いコネクタがふたつ横に並んでいますね。それがセンサ用のコネクタです(画像12)。センサはふたつありますので、車体左側のセンサの配線を左側のコネクタに、右側は右側に差し込みましょう(画像13)。差し込む向きを間違えないでくださいね。
次はモータの接続です。今度はCPUボード右側のコネクタに接続します。「TDK」と記された円柱状の黒い部品の前側に縦に並んでいるコネクタです。ただし、ここには3つのコネクタがあるので注意してください。前側の、2本ピンのコネクタふたつを使います。モータもふたつあるので、接続するコネクタを間違えないよう注意してください。前側が左のモータ、後ろ側が右のモータになります(画像14)。なお、コネクタへの接続はしっかり最後まで行うようにしてください(だからといって、馬鹿力で無理矢理押し込んじゃ駄目ですよ)。
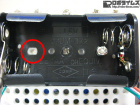
そしていよいよ最後が、電池ボックスの接続です。モーター用の2本ピンコネクタのすぐ後ろ側にある3本ピンコネクタに差し込みます。(画像15)これで、ひとまず完成しました!
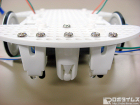
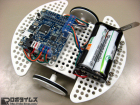
仕上げとして、配線をきれいに片付けてしまいましょう。片付け方は人それぞれなのですが、あまり無理に押し込んでしまうと、断線など故障の原因にもなるので気をつけてください。うまく収納できないようなら、タイヤに絡まないようにさえすれば問題はないです。収納した方が見栄えは美しくなるので、私は写真のように配線をまとめてみました(画像16)。お疲れ様でした。やっと完成です(画像17)!
【動作確認をしてみましょう!】
後は電池をセットしてスイッチを入れればOKです。ちなみにビュートローバーには初めから動作確認用のプログラムが入っています。早速確認してみましょう! プログラムの内容は、白い紙の上(普通に机の上でも動きます)で走らせると、「前進→後退→左旋回→右旋回」の順に繰り返すというものです(動画01)。もし、「後退→前進」と逆になってしまう場合は、モーターコネクタの接続が逆になっている可能性が高いので直してみましょう。
また、ビュートローバーを持ち上げるとブザーが鳴ります。さらに、この状態で左センサーに手をかざすとオレンジが、右センサーに手をかざすとグリーンのLEDが点灯するようになっています。
【最後に】
皆さん私の記事はいかがだったでしょうか? このような仕事は初めてで、読みにくかったり、わかりにくかったところもあったかと思います。少し話が変わりますが、私はロボットプロジェクトという大阪工業大学内の団体に属しています。同プロジェクトのメンバーとして、TVでおなじみのNHK大学ロボコンを始め、要救助者に見立てた人形を探し救助するレスキューロボットコンテスト、ヴイストン主催のライントレース競技会「ビュートロボコン」、ロボットフォース主催の二足歩行ロボットバトル大会「ロボゴング」などに出場してきました。
2011年06月12日(日)に行われたNHK大学ロボコンでは初出場だったのですが、決勝トーナメントに進出して、ベスト8という好成績を収めることができました!(リポートはこちら)。そして2週間後の6月26日(日)に行われた第11回レスキューロボットコンテストの予選では練習の成果を発揮でき、予選1位での通過を果たしました(リポートはこちら)。本戦は8月06日・7日に開催予定ですので、がんばってきます!
そしてビュートロボコンは、この特集記事で扱っている車両型ロボット「ビュートローバー」も参加できる大会です。ただし、私はビュートローバーの前のモデルである「ビュートチェイサー」で参加しました。結果はベスト8と好成績。ところが、自分ではそう思っていたのですが、仲間が2位や3位という好成績をゲットしたため、残念ながら私はあまり目立てませんでした(動画02)。
最後の「ロボゴング」に関しては、近藤に期待されながらも1回戦敗退という失態をしでかす始末。よかれと思って行った改造が裏目に出たのだと深く反省しています。……が、本当は、相手が強すぎたことが最大の理由だと思っているのですが……、ナイショです(動画03)。
これらの経験を活かして、もしまた次にこのような仕事を任されたときには、もう少し上手く記事を書けるよう、腕を上げておきたいと思います。機会があった時は、またお付き合いいただけるよう、よろしくお願いします!
そして、次回予告です!! 次回は電子情報通信工学科の3回生・金沢が担当いたします! 内容はビュートローバー専用プログラムソフト「ビュートビルダー2」の解説です! 乞うご期待!!