編集長コラム「デイビーのひと言」番外編:出動は15・16日頃!
福島原発の超難関ミッションに「Quince」が挑む!!

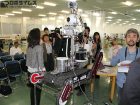
千葉工業大学(千葉工業大学未来ロボット技術研究センター、fuRo)、東北大学、国際レスキューシステム研究機構(IRS)が開発した、4脚のサブクローラ(フリッパー)を備えたクローラ型の災害対応閉鎖空間内探査ロボット「Quince」(発表時の記事はこちら)。その福島原子力発電所への出動が正式に決定したことが6月08日に発表された。世界一の不整地踏破能力(運動性能)を活用し、ほかのロボットでは不可能なほど難易度が非常に高く、なおかつ人も放射線の影響で行えないミッションに挑むことになる。なお、今回はまず第1弾として有線仕様のQuince1号(全部で6機が開発されている)が投入される。その運用で得られたデータをフィードバックして、さらに必要な装備や機能を整えた無線仕様の6号機が後ほど送り込まれ、現地でペアとなって活動する予定だ。
出発の日程は会見の時点では明確になっておらず、当初は会見のすぐ後に出発の予定だった。しかし、落下時の耐衝撃性をさらに強化する必要がわかったために早くても10日夕方に延期。さらに、その問題はクリアしたものの今度は、操縦者の練度をさらに上げる必要があるということでさらに延期となった。Quinceを開発した小柳栄次氏が副所長を務めるfuRoの広報担当の先川原正浩室長に確認を取ったところ、早くても15日夕方、もしくは16日午前中になるだろうということであった。操縦の慣れの問題とは、東京電力のスタッフが操縦するためで、さらに手袋を三重四重にして顔もマスクを被ったりするなど、対放射線対策を施した重装備での操縦となるため、微妙な操作が難しく、より訓練を行う時間が必要となったというわけである。
Quinceの最大の特徴は、世界一の不整地踏破能力を有する点だ。米国テキサス州の災害現場を模したテストフィールド「ディザスター・シティ」において、世界で唯一約40m四方のコンクリートがれきが散乱するフィールドと、さらに足場が悪くてなおかつ日本の環境に近い木材がれきが散乱する同じ面積のフィールドを踏破したロボットなのである。1回目の挑戦となった2008年の時はコンクリートがれきフィールドしか踏破できず(それができたロボットは世界でQuinceのみ)、木材がれきは10mほどだったが、2011年03月09日の挑戦では木材がれきフィールドの踏破にも成功している。地震が発生した時はディザスター・シティで性能試験を行っている最中で、急遽とって日本に返したという次第だ。
本来、Quinceは原子力発電所の放射性汚染環境下での使用を想定して開発されたロボットではない。しかし、2011年04月04日に日本ロボット技術関連学術団体が共同して「東日本大震災およびそれに伴う福島原子力災害に対する日本のロボット技術の適用に関する声明」を発表したり、超学会組織としてロボット研究・開発の有識者の有志が3月31日に結成した対災害ロボティクス・タスクフォース(略称ROBOTAD、主催は東京大学教授の淺間一氏)が働きかけたりしたことなどにより、東京電力が5月20日に正式にQuinceの貸与を要請。それをこの短期間で福島原発仕様に改造し、今回の披露に至ったというわけだ。

実際のところは、GOサインが出たら少しでも早く出動できるようにと、小柳氏らは3月半ば頃から大まかな改造を開始していたという。ただし、実際に使用する原発の建屋内の状況もわからなければ具体的な任務内容もわからない中での作業なので、必要な性能や機能を盛り込むための明確な改造ができなかったのは当然である。よって、5月20日に正式なミッション内容がわかってから具体的な作業に入り、今回の発表にこぎ着けたというわけだ。
しかし、これだけ時間がかかっていることに対し、なぜPackBotはずっと早い段階で使用されることになったのかという点で、疑問に思ったり憤ったりしている人も多いことだろう。そこら辺はQuinceにも関連があるとはいえ、また少し異なる話なのでその内に改めてお届けしたい。ひとついえることは、日本のロボット関係者に落ち度があるわけではなく、「遅かった」のではなく、「遅くならざるを得なかった」のである。とにかく、小柳氏らは全力で努力しているということはご理解いただきたい。
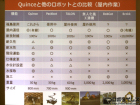
そのほかのQuinceの長所と短所だが、軍事用途ではないため、どうしてもPackBotなどと比較すると耐久性や耐水性の面では劣っている(比較表を参照)。ただし、前述したような階段昇降や不整地踏破などの運動性能や、仕様変更の柔軟性といった点では格段に優秀だ。仕様変更の柔軟性とは、要するに小柳氏らがすべて設計・開発を行っているため、海外のロボットとは異なって改造や装備の追加などを極めて短時間で行えるという意味だ(民生品のみで構成されているので、部品や材料の調達も容易)。
さらに、有線と無線と仕様の異なる複数の機体を連携させて運用させられるので、放射線遮蔽構造によって外部からの電波が届かない原発の建屋内奥深くでも活動できるという特徴も持つ。有線仕様Quinceが無線仕様のアンテナを備えているためだ。なおかつ、操縦者はエアロックから200mも離れた放射性汚染の低い原子炉建屋外のサービスビルディングから操作でき、安全性の面でも優秀である。(有線仕様Quince自体はさらにエアロックから500mの範囲で動ける)。もちろん、Quinceや通信機材をエアロック内に運び込むのに短時間ながら作業者が2~3名は被爆するわけだが、PackBotは1回の使用で1台につき12人が被爆してしまう状況に比べたら遙かに少なくて済むのである。
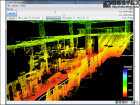
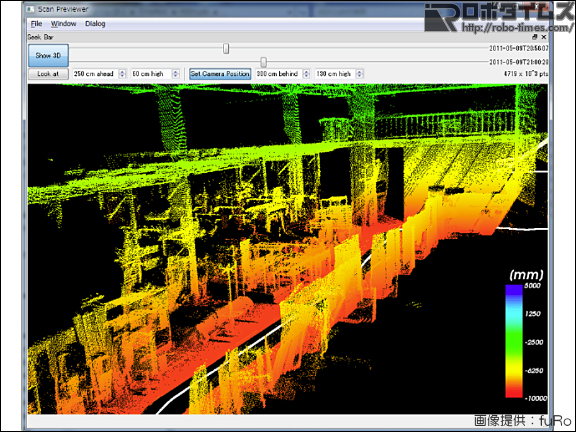
具体的な任務は、まずひとつ目が福島原発の1号機から4号機までの原子炉建屋内の2階から5階までの各フロアの状況調査である。もちろん建屋の図面データはあるのだが、ご存じの通り水素爆発で建屋内の状況は一変。サイズもまちまちなら放射性汚染度もそれぞれ異なる無数のがれきが散らばっている状況なので、そうした環境をレーザーレンジファインダで精密に3Dマッピングするというわけだ。人が入って作業も行っているわけだが、実はまだほんの一部のみ。よって、建屋内の大部分の状況はわかっていない。今回の事態を収束させるためには、今後、より多くの人が入らなければ作業は進まないわけで、そのためにも詳細な環境データは必須なのだ。
また1号機には現時点では搭載されないようだが、γカメラでの建屋内の撮影データも想定しているようだ(一部エリアは既に撮影されている)。γカメラとは、要するにどの方角からどれだけ強力な放射線が出ているかがわかるカメラ。そのデータと3Dデータを照らし合わせることで、放射線源のがれきなどを細かく特定することができるようになるので、より安全性が増すのである。
そしてもうひとつが、さらに重要なミッション。原発1号機から3号機までの地下1階に溜まっている放射性汚染水の水位の計測と水位計の設置、そして汚染水のサンプルリターンだ(地下1階はあまり広い範囲を移動しないので、状況調査は一部のみとなり、踊り場ごとの線量マップを作るという)。中でも重要なのがサンプルリターンで、事故終息のためにも必須である。汚染水を浄化するためにはフィルタを設計しなければいけないが、それにはまずどの程度の汚染なのかがわからなければできない。よって、地下1階から汚染水のサンプルを50cc採取しての帰還は何よりも優先すべき至上命令なのである。
実はこの任務、放射線の危険性で人はもちろん行えないし、ほかのロボットではあまりにも到達と帰還が難しい場所のため、Quinceしかできない。その理由は、建屋内の階段が急傾斜で、なおかつ非常に狭いからだ。角度が緩いとされる1階から上階へ向かう階段ですら約40度で、地下1階へ向かう階段に至っては約42度という急傾斜。スキーの経験者ならおわかりかと思うが、40度を超えるような斜面は上から見下ろすともはや垂直に感じてしまうほどで、一度滑ったら踊り場や下のフロアまでかなりの速度で一気に滑落してしまう可能性があるほど。しかも、ノーマルのQuinceは非常に低重心なので80度ぐらいの傾斜でもひっくり返らないでいられるのだが、今回の改造で自分の自重に近い装備が追加され、重量27kg弱から50kgほどに増加している。しかも重心も上がってしまっているため、42度はギリギリだという。
もちろん滑落するようなことになれば、Quinceが破損して移動不能となり、新たな障害物となってしまう可能性が高い。そこで小柳氏らはQuinceを廃炉予定の浜岡原発1号機に持ち込んだり、千葉工大の研究室内に設置した階段に水で濡らしてがれきを巻いてテストを行ったりして、42度の階段昇降を克服したというわけだ。ただし、ほんのわずかな雑な操作が滑落を招く状況であることには変わらず、今は操縦者の熟練が重要。そのため、若干出発の予定が延びているのである。
もちろん滑落するようなことになれば、Quinceが破損して移動不能となり、新たな障害物となってしまう可能性が高い。そこで小柳氏らはQuinceを廃炉予定の浜岡原発1号機に持ち込んだり、千葉工大の研究室内に設置した階段に水で濡らしてがれきを巻いてテストを行ったりして、42度の階段昇降を克服したというわけだ。ただし、ほんのわずかな雑な操作が滑落を招く状況であることには変わらず、今は操縦者の熟練が重要。そのため、若干出発の予定が延びているのである。
そのほか、Quinceの改造部分などについては、この後の記事でも引き続き掲載の予定。