IRS・千葉工大・東北大の3社が共同開発
災害対応閉鎖空間内探査ロボット「Quince」を発表
国際レスキューシステム研究機構(IRS)、千葉工業大学、東北大学の3社は4月28日、新型の災害対応閉鎖空間内探査ロボット「Quince」(クインス)を千葉工業大学芝園キャンパスにて発表した(画像01)。NEDO(独立行政法人新エネルギー・産業技術総合開発機構)戦略的先端ロボット要素技術開発閉鎖空間内高速走行探査群ロボットの開発プロジェクトで誕生したロボットで、プロジェクト研究代表者は、レスキューロボット開発の第一人者であるIRS代表兼東北大学教授の田所論氏(画像02)。田所氏らはQuinceのセンサ部分を担当し、発表会では同氏が解説を行った。
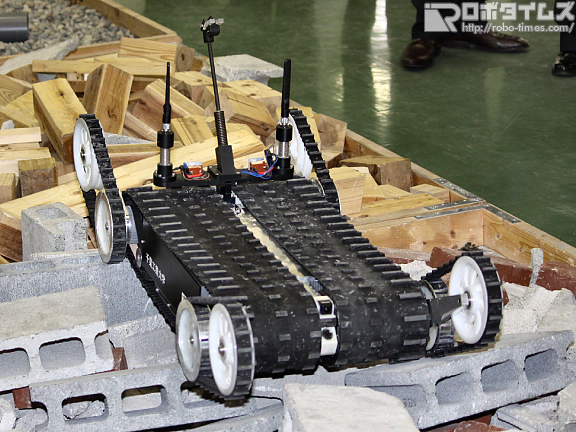
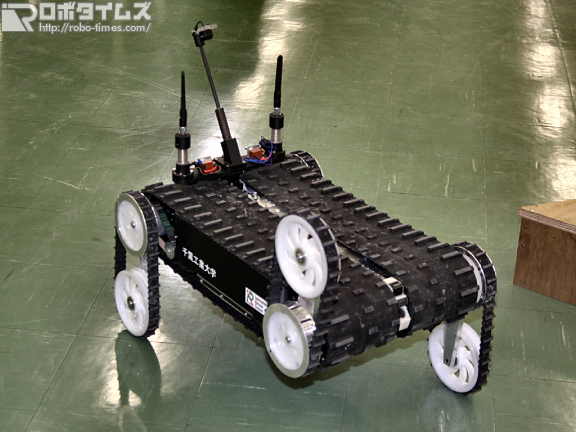
Quinceは、IRSがかつて開発した災害対応閉鎖空間内探査ロボット「Kenaf」の改良・発展型といえる機体。4脚のフリッパーを備えたクローラ型のロボットだ(画像03)。CBRNE(Chemical Biological Radiological Nuclear Explosive:化学・生物・放射性物質・核・手製爆弾)災害の際に、消防隊員などに代わって現場に進入し、要救助者の探索や瓦礫の散乱状況などの状況調査を行うことを目的としている。例えば、LSI工場や化学プラント、遺伝子研究施設などでの化学物質漏洩時や、地下鉄サリン事件のようなテロなどでの調査だ。
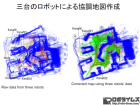
大きな特長は6つある。まず、階段や瓦礫などを含む災害空間における高い走行性能がひとつ(画像04)。続いて、災害空間での活動や汚染物質除去(汚染空間での探査後の洗浄)に不可欠な防塵防水機能。さらに、予期せぬ落下時(最高2m)でも機能を持続できる耐久性もひとつだ。さらに、物体や空間の3次元形状の計測や映像・音声情報のマッピングも機能も有する(画像05)。そのほか、複数台のQuinceからの情報の統合と記録を行えたり(画像06・07)、あらゆる種類の災害に必須の基本機能の上に災害状況に合わせてオプション機能を選択して搭載できたりする仕組みも持つ。

なお基本機能とは、高性能移動機構、アンテナ、前後および俯瞰(3ch)カメラ、マイクロフォン・スピーカ、PSDセンサ(階段検出用)、マニュアル走行、半自律支援機能による階段昇降となる。また、基本機能の一部といっていいのが、現場実用性の防塵・防水・高耐久性も備えている。現場に応じたオプションには、映像探査に用いるパンチルトズームカメラ、3次元マッピング用の3Dレーザレンジファインダ、ドア開けやサンプリング用の6DOF(自由度)マニピュレータ、赤外線サーモグラフィ、CO2センサ、マッピング用のGIS、広範囲探査用のケーブル施設機能、半自律支援機能による瓦礫散乱現場の走破のための瓦礫センシング機能などとなっている(画像08)。
災害空間での高い走行性能を実現しているのが、Kenafで開発された「半自立操縦支援システム」だ(画像09)。同システムは、操縦者が前進などの進行方向を指示ずるだけで、瓦礫など障害物のサイズに合わせて、機体前部の2脚のフリッパーの角度(高さ)をQuince自体が自動調節するというもの。従来は、瓦礫などが散乱している災害空間を移動するのに、操縦者がことあるごとにフリッパーの角度を調節する必要があった。結果、操縦で手一杯となってしまい、肝心な要救助者を見逃してしまうという本末転倒な事態が起きてしまうこともテストでは起きていたという。
Quinceは米国テキサス州の災害現場を模したテストフィールドのディザスター・シティのテストにも参加(画像10)。約40m四方のコンクリートの瓦礫が散乱するフィールドを端から端まで踏破することに成功している(そのほか、約10mの木材瓦礫の踏破や、斜面の横断にも成功している)。3Dインターフェース+半自律瓦礫踏破機能でパンケーキクラッシュした建物内を操縦した際は、非常にわかりやすいという評価を得たという。また、国内でもE-Defense(大規模震動台)実験で、倒壊家屋への進入、倒壊家屋の屋根構造の走破なども成功させている(画像11)。
また、共同研究者として、千葉工業大学側からは、移動機構を担当している同大学未来ロボット技術研究センター(fuRo)副所長の小柳栄次氏も出席した(画像12)。小柳氏は、Quinceについて「数個の大型キャリーケースで運べるシステムとしてのコンパクトさ」もポイントとした(画像13)。トラック1台使わないとシステムすべてを運べないようなものは、実際の災害現場では役に立たないため、Quince本体だけでなく、システムとしてのコンパクトさも求めたという。Quinceのようなロボットの開発については、災害にあった時に、被災者が「日本にはQuinceのようなロボットがあるから、助けに来てくれる」と希望をもってもらえるようにするためとしている。
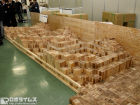
当日の会場には、災害現場を模した障害物や段差が多数設けられた再現性のある評価フィールド(画像14)や、瓦礫の散乱するフィールド、螺旋階段や斜面などが設置され、それらの踏破を行なうなどのデモンストレーションも実施されたのだが、小柳氏は評価フィールドについての解説も行った。評価フィールドは、レスキューロボットコンテストでも採用されているもので、その障害物の位置やサイズ、段差の高低差などすべて毎回再現できるようなブロック状の仕組みにしてあるのが特徴。評価実験では再現性がないと仕様を変更した時にそれが有効なのかどうかの確認が難しいし、コンテストでも同条件じゃないと有利不利が生じてしまう。また、米国ではこうした評価システムが進んでおり、日本も米国に追いつけるよう、開発したとしている。

今後の予定としては、まだ予定している全機能をQuinceに搭載していないので、順次それを実施していくという。そして全国の消防組織との協力の下、今年度末には実際に配備が可能なレベルにブラッシュアップするとしている。特に操縦システムに関しては、現場で実際に使うことになる消防隊員のフィードバックが必要とした。また性能試験として、6月19~25日にシンガポールで開催されるロボカップ世界大会のレスキューロボット部門に出場するほか、米国ディザスター・シティで開催される予定(会期未定)のNIST/ASTM災害対応ロボット訓練大会で、米国災害対応庁隊員による評価も受けるとした。
また発表会では、これまで千葉工業大学で開発してきたレスキューロボットの数々も展示された(画像15)。