JAXA「ライトクローラ」&東工大「Tri-Star IV」
月・惑星探査ロボットも活躍の宙博2010リポート前編
皇居に近い東京・北の丸公園内にある科学技術館で、10月29日から31日までの3日間に渡り、宇宙を題材にした体験型の展示会「宙博2010」が開催された。3日間の来場者数は3万1627名。科学技術館1階のほぼすべてのスペースを利用し、「極小世界から宇宙を探る」、「地球環境の明日を創る」、「宇宙を暮らしに役立てる」、「宇宙へ人類を送り出す」、「宇宙の果てを探査する」、「宇宙のナゾを解明する」の6つのテーマに分けて展示やデモンストレーション、講演などが行われた。前編は月・惑星探査ロボット(ローバ)を紹介。後編では、そのほかの展示内容を紹介する。
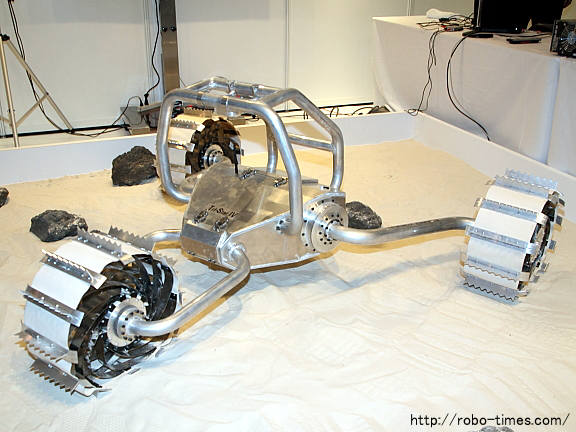
今回は2台のローバがデモンストレーションを実施。東京工業大学の形状可変3輪ローバ「Tri-Star IV」と、JAXAの「ライトクローラ」の走行試験モデル(上半身のロボット部分が搭載されていない走行試験用)の2台だ。レゴリスをイメージした粒の細かい砂を敷き詰め、そこに岩石を複数ランダムに配置した月面を模したスペースにて、Tri-Star IVは走行に加えて変形する様子を、ライトクローラは走行する様子を披露した。
まずは、東京工業大学広瀬茂男教授と福島 E.文彦准教授の研究室で開発されたTri-Star IVから。同研究室はJAXAとの長年にわたる月面探査ロボット開発の共同研究を行っており、月・惑星探査型のロボットはTri-Starシリーズのほか、親機の6本ある車輪のそれぞれが独立して子機になるという機構の「SMC-Rover」などがある。
Tri-Star IVの特徴だが、そのひとつが3輪型であること。3輪構成が採用された理由は、移動に必要な最低限の機構であることと、シンプル=高信頼性で軽量という点からである。もうひとつの特徴が変形することだ。後ろ2輪の付け根は肩関節と呼ばれており、それが回転する仕組みとなっている。それを利用することで、前1輪と揃えてコンパクトな格納姿勢を実現でき、輸送時の省スペース化を実現。さらに、斜面に応じて姿勢を極力水平に保てたり、路面の凹凸に合わせて車高を調整できたり、大きな段差の踏破も可能となっている。さらに、スタックしてしまったとしても車輪を持ち上げてレゴリスから引き抜いたり、転倒してしまった際にも復帰を容易に行えたりするのだ。駆動輪は3輪となっている。スペックは、以下の通りだ。
【スペック】
・展開時全長/全幅/全高(mm):1679/1778/700
・格納時全長/全幅/全高(mm):1355/1231/700
・質量:50.1kg
・車輪直径展開時/縮小時(mm):460/315
・車輪幅:250mm
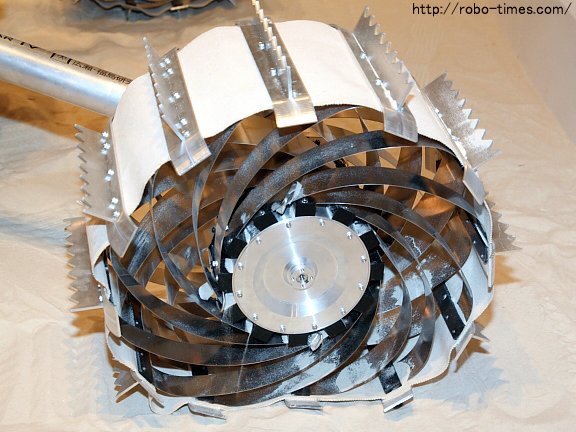
なお、Tri-Star IVはクレーター内など、走行経路に急な坂路が含まれる探査での使用を前提としている。ちなみに、車輪は展開と縮小と2サイズがあるが、こちらは全面的に金属でできているわけではなく、伸縮性がある仕組みだ。現在は布素材も利用している点がポイント。ただし、研究段階なので、もっと適した素材があれば変更していくとしている。
続いては、ライトクローラについて。合わせて、JAXAの月面探査ロボットの航法や制御に関する研究についてもお伝えしよう。まず、移動する際に月面であることから来る最大の問題点は、GPSが使えないこと。そのため、かぐやの探査によって作成された10m分解能の地形図をベースに、レーザーレンジファインダやステレオカメラを使用して地形を計測し、ロボット(クローラ)自身が地形図を作成して自己位置を同定し、移動していくSLAM(Simultaneous Localization and Mapping)技術を利用するとしている。ただし、月までの輸送の問題などから、より小型の地形センサが必要で、JAXAでは小型のレーザーレンジファインダの研究・開発を進めているという。
そして、技術試験衛星VII型(ETS-VII)などで培った自動・遠隔操作技術をベースとした、自動・自律化操作系を搭載すべく研究を進めている形だ。機能としては、地図上で障害物領域や段差、急傾斜などを自動識別するのに始まり、障害物や急傾斜などを避けた目標までの最適経路の自動生成、動力学シミュレーションによる事前の自動確認、経路点列で構成される経路コマンドによる指令といった仕組みを実現するという。もちろん、人が介在する仕組みも用意されており、全体経路計画と進行判断を行い、異常時ももちろん人が指示を出せるようになっている。
クローラの走行機構に関しては、やはりレゴリスがネックで、その対策が重要だ。レゴリスは細かい上にとがっており、月面にはそれが10cm以上、深いところでは10mも積もっているという。硬い車輪だと滑って砂を掘ってしまうためレゴリスの上を走るのに適さない。レゴリスを適度に締め固めながらの移動が理想的で、ライトクローラのような広くフラットな接地面を持つクローラ、もしくはTri-Star IVのような弾性車輪を用いた低圧走行機構が有望なのである。ちなみに、登坂性能の比較試験では、10度まではクローラも弾性車輪もほぼ変わらないが、25度の斜度の時点でクローラの滑り率が0.13~0.14、弾性車輪が0.3弱(数値が小さい方がいい)。剛性車輪に至っては0.75弱となっており、クローラが月面に適していることがわかる。
また、レゴリスは滑りやすさだけでなく、機械の内部に侵入してしまう点も厄介だ。そこで、ライトクローラの実機では、4つある走行機構とも外側にはカバーを付ける形になる(今回の走行試験モデルは3つの転輪が剥き出し)。ちなみに、ライトクローラのモーターの制御システムは、当サイトでもお馴染みのロボットシミュレーションソフト「GoSimulation!」(記事はこちら)を開発した株式会社テクノロード製だ。
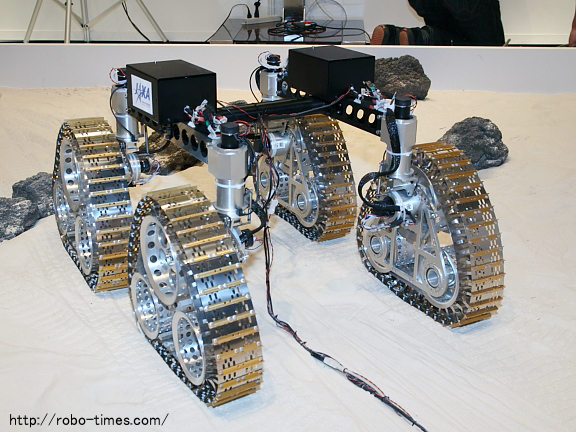
それ以外にも、月面探査ロボットの駆動系には負荷配分が求められる。ライトクローラではロッカー・クローラサスペンション機構を搭載し、それに対応。クローラの滑り率の低さ、そしてサスペンション機構により、岩を乗り越えたりといった荒れ地での走破性も非常に高くなっている。
ちなみに、ライトクローラは最高速度は秒速20cm/s=時速0.72km/hほど。クローラは4基とも駆動し、同時にステアリングも切ることができる。一般的なクルマでいうと、4WD&4WSという具合だ。月面では、安全性の面から実際のところ秒速5cm/sぐらいしか出さないだろうということである。なお、動画でピシピシと家鳴りのような音がしているのは、クローラが金属製であり転輪に合わせて3ヶ所で曲がること、二重履帯方式を採用しており、転輪と接する内側の履帯と地面と接する外側の履帯の間に板バネ構造が設けられており、それが変形することなどによって音がするという具合だ。ピシピシと音がすることの方が逆に正常であり、圧力が分散している証拠だそうである。ちなみにライトクローラが走行する地形に関しては、平坦な場所か緩い坂ということだ。
後編では、太陽光発電衛星やローコストのロケット技術のマイクロ波ロケット、30m級次世代超大型望遠鏡「TMT」(Thirty Meter Telescope)など、そのほかの展示物を紹介する。