【ロボット名鑑】韓国ROBOTIS社「DARwIn-OP」
韓米連合の開発した驚異の安定性を有した二足歩行ロボット
韓国ROBOTIS社は、「BIOLOID」などの学習・教育、ホビー用途のロボットや、サーボモータ「Dynamixel」シリーズを開発、販売しているメーカーだ。同社が、米国立科学財団NSF、バージニア工科大学、パデュー大学、ペン・エンジニアリング社の米1団体・3社とコラボレーションして開発を進めているのが二足歩行ロボットが、オープンプラットフォーム・ヒューマノイドプロジェクト「DARwIn-OP」(以下、DARwIn)だ。Dynamic Anthropomorphic Robot with Intelligence-Open Platformの略で、直訳で申し訳ないのだが、オープンプラットフォーム型のインテリジェンスを持ったダイナミックな関節を持つロボットといった意味になる。
現時点で日本での販売はまだだが、今後予定しており、現在代理店を選定中だ。去る2月にROBOTIS社副社長兼CTOのInyong Ha氏が来日し、株式会社アールティにてデモンストレーションを実施。アールティ代表取締役の中川友紀子氏の取り計らいで、ロボタイムズも取材させてもらえたので、動画でDARwInの優れた運動性能などをお見せしたい。
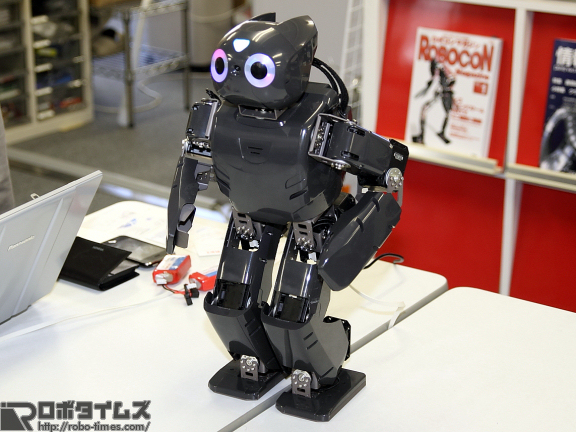
DARwInは身長45.5cm、体重2.8kgという体格を持つ。自由度数はベーシックタイプで20だ。ROBO-ONEなどのロボットバトルに参加すれば、体格的には決して目立たないと思われる。ただし、外装のデザインや仕上がり具合は美しく、また後ほど詳細を述べるが、動作の安定感は驚異的ですらあり、目立つことは間違いない。
今述べたようにおおよそ100万円という価格であることから、ターゲットは主に研究・開発用途だ。教育用途も考えられるが、さすがにホビーユーザーはそう多くはないだろう。なおオープンプラットフォームなので、DARwInを構成するメカ、エレクトロニクス、ソフトウェア、マネジメントシステム、コミュニティリソースなどの情報はすべてオープンにされており、英語だがsourceforgeで見ることが可能だ。
性能としては、標準的な歩行速度が毎秒24cm、1ステップにかかる時間なら0.25秒。動画を見てもらえばわかるが、速い上に安定している。しかも、ツルツルしたテーブルの上だろうと(動画はこちら)、足を取られやすいカーペットの上だろうと(動画はこちら)安定感を発揮して移動していく点が魅力的だ。3軸ジャイロと3軸加速度センサを標準搭載しており、オプションで足部には片足4ヶ所のFSR(圧力)センサを搭載できる。
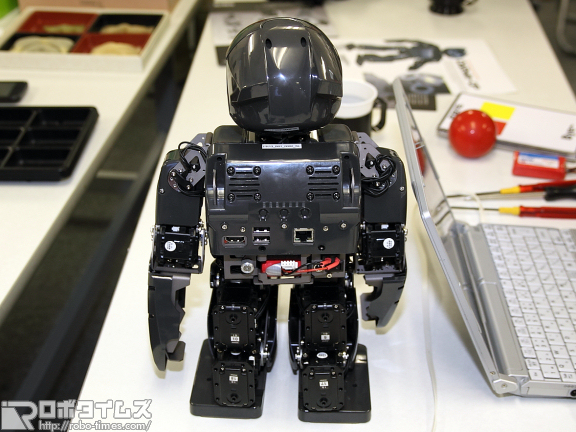
アーキテクチャは、1.6GHzのインテル製CPU「Atom Z530」を搭載したビルトインPCがUSBや無線LAN、HDMIなどを管理し、それと2MBpsのシリアルバスで72MHzのARMコア「CortexM3 STM32F103RE」搭載の制御用コントローラ「CM-730」と接続。さらにそこから、4.5Mbpsの転送速度のDynamixelバスを用いて全身20個のサーボモータ「Dynamixel RX-28M」を制御しているという仕組みだ。
そして、今回のデモンストレーションで特に感心させられたのが、かかとを支点にして後ろに身体を傾けさせた状態から前にパタンと倒した時のDARwInの反応。価格が違うのだから比較するのは無理かも知れないが、普通のホビーロボットなら簡単にそのまま前に倒れてしまうところである。しかしDARwInは異なり、瞬間的に足を踏ん張って若干身体を沈み込ませ、そのまま立っていられるのだ。つま先を軸にして、前から後ろに倒しても同じ。グッと沈み込ませて立ち、その踏ん張った反動の揺り戻しが生じるようなこともない。一瞬で機体を安定させてしまうのだ(動画はこちら)。
一般的な二足歩行ホビーロボットだと、ロボットバトルやロボットサッカーでアチコチと動いたり方向転換したりしている内に、フラフラとし出してその揺れを収められず、最終的に倒れてしまうということはよくある話だが、DARwInならよほど足場がひどかったりしない限りはないようだ。驚異的な安定感を有しているといえよう。またその場での足踏みをして、かなりペースを上げてもまったく倒れる様子がないというパフォーマンスも見せてもらった(動画はこちら)。ホビーロボットよりももっと高額な開発・研究用の機体を含めても、ここまで安定した状態で素早い身のこなしというのはなかなか見られるものではない。用途が違うかも知れないが、愛機の製作に100万円以上かけているビルダーの人たちもいることを考えれば、ロボットバトルの参加機体のベース機としてDARwInをチョイスするというのもありなのではないだろうか。ただしInyong Ha氏によれば、DARwIn用のモーション作成ツールは既存のホビーロボット用のそれらと比較すると高度で難しい作りになっているそうなので、そこを乗り越える努力は必要なようだ。
ちなみに、いくら何でも人に蹴られたらDARwInも倒れてしまうわけで、頑丈さを披露するためにではあるが、Inyong Ha氏があえてDARwInを軽く蹴倒すという過激なパフォーマンスも披露(動画はこちら)。蹴られても、何事もなかったかのように起き上がってくるのはもちろんで、仰向け状態からは3.9秒で、うつぶせ状態からは2.8秒で起き上がるそうである。
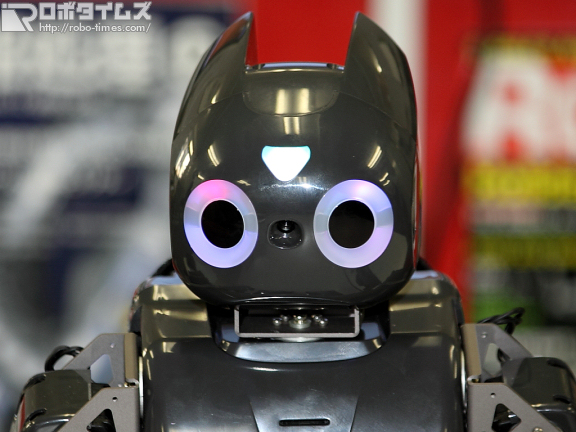
またDARwInは画像認識機能も搭載しており、デモンストレーションでは赤い球を追いかけ続け、ドリブルしたりシュートしたりといったことも簡単にこなしてみせた。首を前後に稼働させられることから自分のつま先も見ることができ、足下の死角は非常に少なく、ロボットサッカーも行いやすいよう設計されているようだ。ロボカップでDARwInクラスというのを設けるのもありかもしれない。
最後に、オプションに関する話だが、まず腕部。通常は先端部分が稼働しない片腕で肩2+ヒジ1の3軸だが、グリッパー(モノをつかめる)タイプの4軸、それにさらにヨージョイントを追加した5軸のグリッパータイプも用意されている。またセンサも強化でき、足部には片足4ヶ所にFSR(圧力)センサを、頭部にはマイクをふたつ追加可能だ。