【ロボットのいる施設を訪ねて】特別編
「生活支援ロボット安全検証センター」その1

2010年末にオープンした、日本のサービスロボットの産業化においてキーとなる重要施設「生活支援ロボット安全検証センター」(以下、RSセンター)。プロジェクトなどの詳細はこちらを見ていただくとして、今回は「ロボットのいる施設を訪ねて」特別編として、RSセンターの各施設を複数回に分けて紹介する。なぜ特別編かというと、いうまでもないが一般の展示施設ではないためだ。基本、「ロボットのいる施設を訪ねて」は、ロボットが展示されていたりデモンストレーションを行っていたりする、誰でも訪ねることが可能な科学・技術系の展示施設を紹介するのがコンセプト。RSセンターはそれに当てはまらないわけだが、施設であるという点と、取材してまだまだ紹介していない情報や画像、動画が多数あるので、お蔵入りさせてしまうのはもったいないことから、特別編ということで紹介させていただく。ある意味、面白さは展示施設並みなので、ぜひご覧いただきたい。
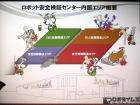
その1で取り上げるのは、RSセンターにある4つのエリアの内の「走行試験関連エリア」だ。ここは大きくふたつのエリアに分かれており、大小5種類の試験が行われる。RSセンターでこのエリアだけが2階建てとなっており、広さはちょっとした体育館並み。屋外から見るとここだけ2階部分が突き出ているのがわかるのだ。
そして走行試験関連エリア内のふたつあるエリアの内、年末のメディア向け内覧会においてデモンストレーションが行われたのが、「3次元動作解析装置」が設置されたエリアである。ここでは、人のすぐそばで活動する移動可能な生活支援ロボットが、人や障害物などに接近した際の検知と対応、つまりは接触する前に停止したり回避したりといった「機能安全」の試験を3次元的に計測・記録できるのだ。
基本的な検証方法として、人の代わりとなるダミー人形を用いて、検証したいロボットをそれに向かわせていったり、お互いに接近したりして、実際にロボットが止まれるかどうか、回避できるかどうかをチェックする。ダミー人形の全身にはモーションキャプチャでお馴染みのマーカが備えられており、また試験を行うロボットにもマーカーを取り付ける。そしてエリアを囲むようにして2階よりも高い位置に備えつけられたカメラで記録するというわけだ。カメラは四方に計12台取り付けられており、死角がないようになっている。この仕組みが、3次元動作解析装置というわけだ。
3次元動作解析装置の解析性能は、幅10m×奥行き10m×高さ2mの範囲内ならcm単位での分解能を計測が可能。4m×4m×2mに絞れば、mm単位で計測できる。同時計測点(マーカの数)は70以上、時速12km/hまでの移動体を補足でき、視線計測情報との連携も行える。
またダミー人形は、「障害物接近再現装置」に載せて移動させる仕組みだ。同装置の仕様は、サイズが幅544mm×奥行き544mm×高さ261mm。最高速度は4m/s=14.4km/hで、最高加速度が2m/s・s(ともに20kg積載時)。最大積載重量は80kgとなっている。軸数は車輪4軸、操舵輪4軸の計8軸で、斜め方向も含む前後左右に自在に動くことが可能だ。

内覧会で行われたデモンストレーションは2種類。ひとつは、富士重工株式会社と埼玉工業大学と住友商事株式会社が共同開発中のオフィス内用「専用部小型清掃ロボット」が、立っているダミー人形(成人男性型)に秒速50cm/s=時速1.8km/hで接近するケース(動画はこちら)。「立っている人に対する安全な一時停止、人がよけた後の安全な移動の再開」というシチュエーションだ。専用部小型清掃ロボットはダミー人形に近づくと、安全な距離を持って停止、接触は回避されるという流れである。
もうひとつは、綜合警備保障株式会社製警備ロボット「Reborg-Q」が秒速30cm/s=時速1.08km/hでダミー人形に接近。一方で、ダミー人形も同じ速度でReborg-Qに向かって接近し、30度の角度で交差するというケースだ。「歩いている人に対する安全な減速と停止、そして人が通り過ぎた後の安全な移動の再開」というシチュエーションである(動画はこちら)。Reborg-Qは迫ってくる人が一定以上近づくと停止、人がよけた後に安全な方向に移動を再開する。どちらのデモンストレーションも機能安全がきっちり働き、当たり前だが接触はなし。そしてこれらはすべて3次元的に計測されて記録され、すぐに確認が可能。安全性を数値化し、対応の仕方を確認できるというわけだ(動画はこちら)。
そのほか、3次元動作解析装置エリアの近くの小部屋には「環境認識性能試験装置(光干渉試験)」がある。同装置は、人を確実に認識できるかどうかセンサの性能を調べることもを目的としたものだ。人工太陽灯(18000Wメタルハライドランプ、照度6万lux以上、照射距離10m、照明径2m)、白熱電球(1000Wハロゲンランプ、明るさ2万lm)、蛍光灯(40W直管型インバータタイプ、明るさ3340lm)、ストロボ光(キセノンフラッシュ管100W一灯式、周波数0~500Hz)などによる人工的な外乱光のもとで試験を行えるようになっている。センサーコンポーネントだけを取り出して設置して、
もうひとつ、「ロボット走行状態模擬装置」も紹介されていたが、これは取材時はまだ設置されていなかった。3次元動作解析装置エリア内に設置する模様で、より高速で移動できるロボットに対応するためのシャシーダイナモを改造した装置だ。3次元動作解析装置エリアは20m四方ほどの面積があるが、速度の出るロボットにとっては十分とはいえない。そこで、高速移動が可能なロボットは同装置の上で擬似的に移動しているようにし、ダミー人形やほかのロボットなどのみを接近させて、動作の解析をするというわけだ。同装置の設置ピットサイズは幅2.5m×奥行き2.5m×高さ1mで、走行速度は時速15km/hに対応。制動トルクは最大15N/mで、加減速度は最大4m/sとなっている。

そして走行試験関連エリアの残り半分にあるのが、「多目的走行性試験路」と「傾斜走行性試験路」だ。多目的走行性試験路は、ロボットを実際に使用する環境を想定した床面で、安全に走れるかどうかを試験する。エリアは、廊下などを模した縦3m×横10mの細い長方形と、病院の受付などのようなある程度広さを持った場所を想定した縦13m×横10mという正方形に近い長方形がくっついた形だ。床面はパネル式で、板張りのフローリング、病院のフロアなどで使われるやや滑りやすいPタイル、ロボットが苦手とするタイルカーペットの3種類から選べるようになっている。将来的には床面の種類を増やす可能性もあるようで、家庭へのサービスロボットということであれば、畳も用意されるようになると予想される。付帯設備として、「回転性能試験用移動壁」や「最高速度測定用機材」があるほか、濡れた床面を作り出すための散水装置まで設置されている。
もうひとつの傾斜走行性試験路は、多目的走行性試験路の坂道・傾斜路版といった感じだ。傾いた状態で走行してロボットが倒れないかどうか、坂道の登り降りを安全に行えるか。ロボットの持つ最高速度で傾斜を下りながら、急旋回を行うといった足回りにとってはかなり過酷な試験をする。幅3m×長さ15mの「坂道試験路」と、幅7m×長さ7mの「傾斜試験路」からなり、どちらも最大10度まで個別に設定可能だ。また、フローリング、Pタイル、タイルカーペット、セーフティーウォークの4種類から床面の種類を選べるようになっている。