産業技術総合研究所つくばセンターオープンラボ
前編は「アクトロイド-F」や「RAPUDA」などを紹介

10月14日と15日の2日間に渡り、独立行政法人産業技術総合研究所つくばセンターにおいて、「産総研オープンラボ」が開催された。産総研が開発に関わったロボット、もしくは産総研が開発したロボット用の開発ツール「RTミドルウェア」を利用した大学や一般企業のロボットなども展示された。前編はロボットとそれに関連する技術などを、後編では「ニューロコミュニケーター」の紹介をする。
まず最初は、当サイトでは初紹介となる、2010年04月に発表された株式会社ココロのアクトロイドシリーズの最新シリーズ「遠隔操作型ACTROID-F」(アクトロイドF)から。大阪大学教授で株式会社国際電気通信基礎技術研究所フェローの石黒浩が開発した、遠隔操作型アンドロイド「ジェミノイドF」の製品版である。科学系展示施設における展示のほかに、病院などにおいてアンドロイドがオブザーバーとして患者の安心感を得られるかどうかといった利用方法も実験が進められているロボットだ。産総研では、知能システム研究部門サービスロボティクス研究グループでの研究に利用されている。人と共存し、人と自然にコミュニケーションしたり、人同士のコミュニケーションを円滑にしたりするロボットの実現を目指すための、研究用プラットフォームとして活用されている次第だ。

アクトロイド-Fの特徴は、表情が豊かで、自然なほほえみや歯を見せるような笑い方などを再現できることがひとつ。また、操作者の表情や、うなずいたり首を振ったりといった顔の動きをトレースする画像認識を用いた機能が用意されており、操作者の代役を務めさせるのが、比較的容易となっていることなどがある。それらは動画をご覧いただきたい。さらに、従来のアクトロイドシリーズと比べて遠隔操作に必要最低限の自由度に絞り込むことで約3分の1という大幅なコストダウンを実現したほか、約30kgという軽量化も実現している。なお、座った状態での利用が基本となっており(足は飾りなので立つことはできない)、イスに固定する形だ(その状態でのサイズは、高さ1400mm×幅600mm×奥行き800mm)。
また顔だが、海外での展開も考慮し、ロシア人とのクォーターの女性をモデルとした。そのほか、従来のココロ製品同様に空圧アクチュエータを利用しているのだが、家庭用電源で駆動できるコンプレッサーを採用しており、従来よりも大幅なシステムの小型化を実現している。なお、最新の青年女性型ロボットとしては、このアクトロイド-Fと双璧をなす、産総研の「HRP-4C 未夢」もデザインはココロが手がけたもの。CEATECで披露された「VocaListener」を披露していたが、こちらはCEATECの記事前編でごらんいただきたい(記事はこちら)
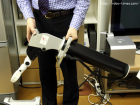
続いては、知能システム研究部門サービスロボティクス研究グループの「上肢に障害のある人の生活を支援するロボットアーム RAPUDA」(ラピューダ)。安全・安心・安価をコンセプトに上肢支援を行うロボットアームで、さまざまなインターフェースを選べること、取り付け・取り外しが容易なこと、ヒジ関節に当たる部分がないため、身体を挟み込んだりする心配がないことなどが特徴となっている。当サイトでも、CEATEC前編のリポート記事で静止画を紹介したが、今回は実際にその動く様子を撮影することができた。2種類ある動画の内、最初のものは、複雑な操作ができないため、目的のアイコンが表示された時にボタンを押すことでコントロールするオートスキャン型GUIとシングルボタンを組み合わせたインターフェースで操作したもの。ふたつ目は、ジョイスティックで操作したものとなっている。

知能システム研究部門フィールドロボティクス研究グループの「屋内外をシームレスに自律走行する車いす」および「協調走行する車いす」。中遠距離の移動の支援に貢献するために、電動車いすに自律移動技術や協調走行技術を付加して、利用者の安全性・利便性向上、操作負担の低減などを図ることを目的として研究されている技術である。今回のデモでは、3台を用いて屋外を走行した。先頭の1台はレーザーレンジセンサで自動的に構築される環境マップを活用して自己位置を推定し、屋内外を自律的に目的地まで移動するというもの。一度通ったルートを記憶する仕組みを有する。
2台目と3台目は協調走行の機能を持たされており、前走車の反射素材を巻いたポールをマーカーにしており、一定の距離を保って後を着いていく。前走車が速度を落としたり、停止すれば、それに合わせて衝突しないように自らも速度を落としたり、停止する。またカーブでは、前走車のマーカーめがけて前走車よりも内側のルートを通りそうな感じがあるが、きちんと前走車のルートを通っていくようになっており、前走車が壁などギリギリを通過したとしても、ぶつからないようになっているようだ。
そして、産総研開発のロボットとしては若干以前のものになるが、「HRP-2 PROMET」(今回見たのは9号機)もがんばっていた。知能システム研究部門タスクビジョン研究グループ/サービスロボティクス研究グループによる「作業技能構築法:ヒューマノイドロボットHRP-2による精密な操作」と題した技術だ。ノーマルな機体は片腕6軸で5指ハンドのHRP-2だが、もう1軸追加した上に特殊な手先の腕を装備したHRP-2がナットをボルトに締める作業を披露した(通常のHRP-2は、こちらで紹介)。
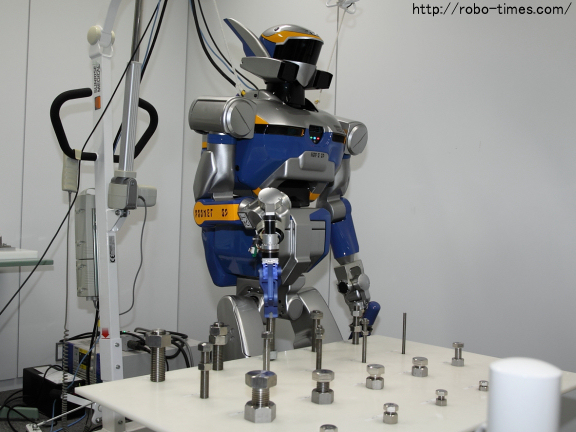
ナットはいうまでもないが、角度をピタリと合わせないと回していけない。人なら簡単だが、そうした微妙な手先の器用さを求められる動作はロボットにとってなかなか難しい作業。その微調整を手先で行った上で、1軸多い腕を利用することで回して締められるというわけである。ちなみに、そのナット締めの手先の器用さの技術自体が中心ではなく、操作者によるロボットの操作データを利用して、再利用可能な作業プログラムを開発するという研究である。微妙な力の加減を必要とするような作業のプログラミングは非常に煩雑なため、それを簡便化することを目的とした研究だ。システムのRTコンポーネント化を行うことで、ロボットの機能をモジュール化して組み合わせて利用することも可能となるとしている。
そして注目は、この12月に完成するというロボット安全研究拠点に関して。直接的な紹介はあまりなかったのだが、「生活支援ロボットの安全性検証用試験装置の開発」(知能システム研究部門フィールドロボティクス研究グループ/ディペンダブルシステム研究グループ)と「生活支援ロボットのリスクアセスメントと機能安全」(知能システム研究部門ディペンダブルシステム研究グループ)のふたつが紹介されいていた。前者は、人と接する生活支援ロボットの安全に関する試験データの取得・蓄積・分析を実施するための各種装置を写真ではあるが紹介。静的安定性試験装置、ドラム式走行耐久性試験装置、ベルト式走行耐久性試験装置などが紹介されていた。

後者は、サービス(生活支援)ロボットの機械・電気安全、機能安全などに関わる試験を行うことで安全に関するデータを取得し、そして分析し、具体的な安全性検証手法を確立することを目的としている。両研究とも、NEDOの「生活支援ロボット実用化プロジェクト」の委託業務の一環として行われており、機械安全に関するロボットの安全性試験評価方法の開発を実施中だ。ロボット安全研究拠点は、12月につくばエクスプレスの研究学園駅から徒歩10分ほどの場所にオープン予定で、サービスロボットの試験に加えて安全認証も行なえる、日本が世界的にロボットをリードできるか否かを担う重要な施設。すでに建物はだいぶ完成しているそうで、周囲の壁に描くイラストをどうするかというところらしい。外見のイメージイラストが飾られていたので、合わせて紹介しておく。
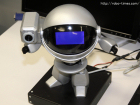
最後は、そのほか出展していたロボットたち。株式会社セック、アイ・ビー株式会社が開発した「インフォメーションロボット」、芝浦工業大学水川研究室で開発された「RTC-CANopen」(国際標準通信プロトコル「CANopen」の特徴を取り入れた組込み向けのRTミドルウェア)を実装したロボットなどがあった。また、株式会社リバストは、同社が扱うシステムがまったく異なる海外2社のロボットを、RTミドルウェアを利用することでひとつのシステムで連動させて動かすというRTミドルウェアの有効な活用方法を披露していた。
後編は、ヒューマンライフテクノロジー研究部門ニューロテクノロジー研究グループの「ニューロコミュニケーター」のについて。