風でテザーのねじれる中、300mを昇り詰めたのは!?
第2回宇宙エレベーター技術競技会リポート
8月07日から9日までの3日間に渡り、千葉県船橋市の日本大学二和校地において、第2回宇宙エレベーター技術競技会が行われた。海外の大学も含め、15チームがエントリーし、300mの高みに挑んだ。主催は、一般社団法人宇宙エレベーター協会。
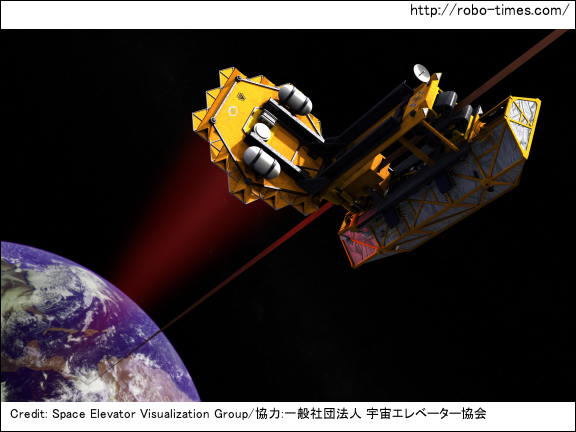
宇宙エレベーターとは、近年、宇宙への輸送システムとして環境破壊の面や、発進時の高Gが搭乗者に多大な負担をかけるなど、ロケットの限界が見えてきていることから、それに替わるシステムとして注目されている技術のひとつだ(画像02)。
簡単に説明すると、地上3万6000kmに浮かぶ静止衛星と地上(もしくは海上)の基地をロープで結び、そこをエレベーターが昇降するという仕組みである。地上に3万6000km分ロープを降ろすことに対してバランスをとるため、反対側にも同じ長さだけ延ばすので、総延長は少なくとも7万2000kmになり、構想によっては10万km、15万kmに達するものもあるという。現在建設中の東京スカイツリーですら、完成して634mということだから、7万2000kmという高さが、どれだけ桁違いなことがわかるはず。月までの平均距離が38万kmなので、5分の1弱から半分近くまでの高さを有した建造物となるのだ。
これまでは、地上と宇宙とを結ぶロープに必要とされる引っ張り強度を満たせる物質がなかったのだが、カーボンナノチューブの登場で、理論的には可能となり、まったくの夢物語から一歩前進した状態になってきたのが、近年の宇宙エレベーターの事情である。
そんな宇宙エレベーターを実現しようとして、アメリカではNASAから総額400万ドルの支援を受け、ボーイング社などもスポンサーとなり、2005年から2010年まで年に1~2回のペースで技術競技会が行われてきた。それに日本から参加した経験のある大野修一氏らが立ち上げた組織が、一般社団法人宇宙エレベーター協会というわけだ。大野氏が会長を、日本大学理工学部精密機械工学科教授の青木義男氏が副会長を務める組織である。
同協会では、昨年から年1回のペースで、宇宙エレベーター技術競技会をスタート。一定の高さまで上げたバルーン(画像03)につなげたテザー(今年は50mm幅を持つポリエステルベルトが使用された)を伝って、クライマー(機能的にロボットの一種といえる昇降機)に昇り降りさせるという内容だ。第1回は150mで設定され、毎年倍にしていくというルールから、今年は300mに設定(画像04)。安全性、速度、確実性などが高い精度で要求され、屋内実験が難しいため、経験やシミュレーション、思考実験、それらから導き出される開発コンセプトと現場の状況を想定したさまざまなフューエルセーフ的な対策とが非常に重要となる競技である。

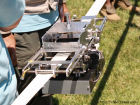
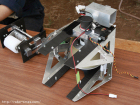
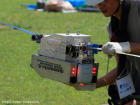
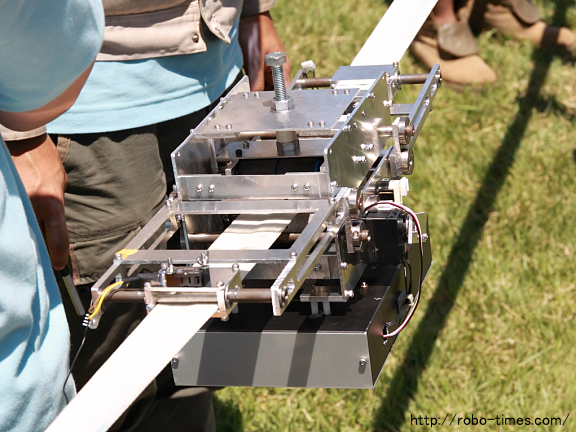
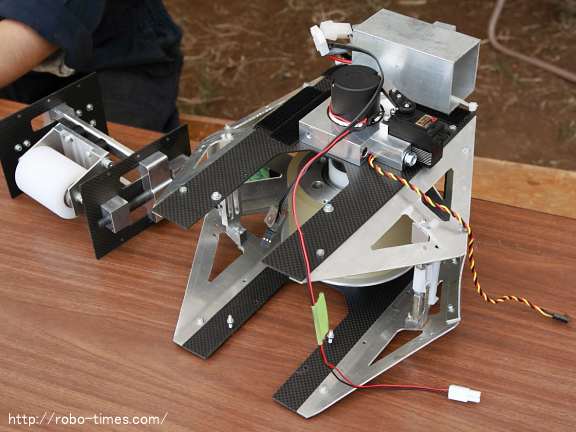
クライマーの条件は、バッテリー駆動であること(外部からエネルギーを得てはいけない)、重量が15kg以内、競技の前後において重量が5%以上変化してはいけない、縦横奥行き各最大2m以内という大まかなもの。片手で持てるような小型機にして重量を軽くすることに活路を見出すチームもあれば(画像05)、車のロングホイールベース化と同じ考えで全長を制限の2m近くまで延ばして上昇時の安定性を重視するチーム(画像06)もあった。まさにさまざまだ。ローラー部分の機構なども多種多様だし、緊急時の対策などもチームごとにことなる。まさにチームの数だけコンセプトがあり、非常にバラエティに富んでいるのが同競技会の参加機体の特色だ。
参加チームと機体は、以下の通り。所属、チーム名、クライマー名の順番で(個人参加や有志の集まりの場合は、所属はなし)、所属名→チーム名→クライマー名の順でそれぞれ五十音順(アルファベットが最初)に並べてある。
・磯子工業高校/えりたけんちゃん/えりたけんちゃん
・神奈川大学/神大 江上研 A/KSC-III(ケーエスシースリー)
・神奈川大学/神大 江上研 B/KSC-V(ケーエスシーファイブ)
・サスカッチュワン大学/University of Saskatchewan Space Design Team/2TL(2 Toonies and a Loonie)
・静岡大学/SATT/うなぎのぼり
・東海大学/宇宙エレベータ レース チャレンジ/東海 GO(トウカイ ゴウ)
・東京電機大学/TDU Fujita Lab/climber 01(クライマー 01)
・日本大学/入江研究室/ハロ
・日本大学/SAKURANA(サクラナ)/SAKURANA
・日本大学/日大青木研/CAL(カル)
・日本大学/日大青木研II/パンダ1号
・ミュンヘン工科大学/-/Tesla
・-/Earth-Track-controllers/Earth-Track-controllers #2
・-/The 4th Laboratory/呑龍(ドンリュウ)
・-/チーム奥澤/momonga-2(モモンガ-2)

ちなみに、昨年はダントツの性能を見せ、ぶっちぎりといっていい優勝を飾ったドイツ・ミュンヘン工科大学(画像07)だが、ディフェンディングチャンピオンとして今年も参戦。チームメンバーに話を聞いてみたところ、「もちろん上位は狙っていますし、できれば優勝したいです」と力強いコメントをくれた。しかし、今回は新しいことに挑戦し、去年のクライマーと比べると複雑化しており、ちゃんと機能するかどうかの点が心配で、実際のところはトライしてみるまではわからない、とも語ってくれた。
また、日本を含めた他チームに対しては、「すごい機体がいくつもあるので、油断できないです」とコメントしている。彼らは第1回に参加した時、2005年から開発しており、ノウハウの面でダントツのリードがあり、それが優勝できた大きな理由としていた。昨年は、日本チームはどこも長くて半年、中にはたった数ヶ月で機体を完成させてきており、そんな短期間の開発で実際に昇ったことには驚かされたとコメントしていた。今年は、日本チームも昨年参加したチームは特にノウハウがあるだろうし、開発時感ももう少し取れているのではないかと思われるので、ミュンヘン工科大学チームを驚かせられるのではないだろうか?
第2回の競技内容は、昨年と同じようにクライマーがテザーを昇降する「ベルトテザー競技」に加え、エキジビションでロープを昇降する「ロープテザー競技」が行われた。ロープテザー競技では、サスカッチュワン大学(画像08)が披露し、ものすごい勢いで昇る様子は圧巻だったが、途中でトラブルにより落下、破損という非常事態に。ただし、落下した原因ははっきりしているということであった。これら、2種類の競技で計測したベスト上昇タイム、競技要素、実験的要素、プレゼンなどのポイントが加算され、総合的に評価を実施した。
初日は非常に風が強く、また、2日目の晩から3日目の早朝にかけて雨が降るなど、天候はもちろん、風にも左右されてしまうのが同技術競技会の難しいところ(画像09)。しかし、2日目の午前中は風も弱くなるなど、無事3日間通して開催され、見事、300mを昇り切ったクライマーも現れた。ゴールに到達したという事実、そのときのタイム、安全性など、多角的に考慮が重ねられ、第2回の総合優勝は、神奈川大学江上研Bチームの「KSC-V」(画像01)の頭上に輝いた。理由は、風が強くテザーがうなるなど過酷な環境下だったにも関わらず、きっちりとゴールに到達したことがまずひとつ。しかも、2分36秒という、タイムもすばらしかった。300mに到達できたクライマーは2台だけだったのだが、完全に降りることも達成。しかも、今回最も重視されていた「安全面」においても、問題なく下降したことが評価された。
総合準優勝に輝いたのは、伝統の機体名を引き継いだ日本大学羽多野研究室の「SAKURANA」(画像10)。2日目の3番手にスタートし、今回初めて300mに到達した機体だった。惜しくも下降中に停止してしまったが、6分26秒というタイムでゴールに到達したことが評価された。また、総合3位は静岡大学の「うなぎのぼり」(画像11)。ゴールまでは到達できなかったのだが、直前まで行っていたことから、総合3位となった。
なお、昨年のスピード重視だった評価方法に比べ、今年はスピード、制御、耐環境、メンテナンス、信頼・安全性、多機能の6項目で評価を行い、順位を決定したとし、それぞれ6項目ごとに秀でた機体にも賞が贈られた。各賞の受賞チームおよび機体は以下の通り。
・スピード賞:神奈川大学江上研B/KSC-V
・制御賞:日本大学/SAKURANA
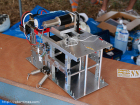
・耐環境賞:日本大学青木研/CAL(カル)(画像12)
・メンテナンス賞:Earth-Track-controllers・チームCHAD/Earth-Track-controllers #2
・信頼・安全賞:該当なし
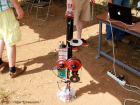
・多機能賞:チーム奥沢/momonga(モモンガ)-2(画像13)
各賞のそれぞれの受賞理由は、まずKSC-Vのスピード賞。これは、総合優勝した大きな理由のひとつと同じで、ゴールに到達することが重視されており、それを好タイムで成し遂げたことが大きい。SAKURANAの制御賞は、自動制御で上昇下降できる機能が評価された。CALの耐環境賞は、同機は太さ、材質、ねじれ具合の異なるどんなテザーであっても、また風によるねじれや重量の影響があっても対応可能な設計となっており、そのロバスト性が高評価を得た。メンテナンス賞のEarth-Track-controllers #2は、スタート時のクライマーをテザーにセットする時の早さが、他チームよりも際立っていた点での評価(画像14)。多機能賞のmomonga-2は、多彩な可能性や実現性を備えたクライマーとなっており、アイディアの豊富さもすばらしかった。なお、信頼・安全賞の該当なしに関しては、際だったチームがいなかったため、が理由だ。
また、2日目の午前中には、宇宙エレベーター技術競技会とは別競技として、レゴ・マインドストームNXTで製作したクライマーで50~100mの高度を目指す、「耐久エンデュランスLASER」の第1回実験も行われた。こちらは、参加5チームの内、3チームがゴールに到達した。そのほか、初日には子供たちが自分たちで作ったマインドストームNXTのクライマーで、30mほどの高さに挑戦。かなり強い風でバルーンがなびき、テザーも激しく揺さぶられていたが、ちゃんとゴールしている機体もあり、改めてマインドストームNXTと子供たちのセンスに感心した次第であった(画像15)。
運営サイドとしては、今大会は6項目で評価でき、昨年よりも公平さを増すことができたことをまず挙げている。今年は、ミュンヘン大学に加え、カナダのサスカッチュワン大学、アメリカ(実際には日米混成)のEarth-Track-controllersチームも参加しており、海外がどのような視点を持っているかという点を知ることができたこと、学生たちの国際交流ができたことも喜ばしいとした。交流の面では、毎日競技の終了後にはプレゼンも実施(画像16)。各チームが技術をクローズドにするのではなく、オープンにするのが宇宙エレベーター技術競技会の特徴である。
また、来年の第3回は、600mとなるため、技術的課題としては、自律制御システムをクライマーに導入しないと、コントロールが難しくなるだろうと予想しているようだ(昨年も今年も無線操縦方式は普通)。そのためには、競技に関わるチームのメンバー数や、技術力も倍のものが必要になると予想され、来年の競技会はより盛り上がるだろう、ということである。ただ、600mまで行くと完全に航空法の問題が出てくるので会場を移さないとならない可能性も出てくるし、現状のバルーンでは風の影響が大きいため、もっとバルーンが流されないような固定方法なども求められそうだ。なにより、今回の300mでも2機しかゴールに到達していないため、いきなり600mで大丈夫なのか、という問題もある。しかし、宇宙エレベーターは少なくとも3万6000kmの静止衛星軌道に到達することが求められているわけで、目標を高く設定しているということなのだろう。
さらに、今後の予定としては、より技術開発を促進し、見ていておもしろい競技会を開催するため、各種レギュレーションによるカテゴリー分けなどを行うことも検討中とした。海外の国際会議で今回の競技会で得た情報や結果、宇宙エレベーター構築のための技術課題を発表し、日本国内だけでなく、海外研究者との情報交換、協力体制の構築にも力を入れていくということである。ワークショップやアイディアコンテストなども予定されているので、宇宙エレベーターは夏の風物詩的競技会ではなく、常時要チェックというわけだ。なにはともあれ、おめでとう、神奈川大学江上研BチームとKSC-V!