「RoboCar」と適合ツール「CANap」をXCPで接続
ゼットエムピーとベクター・ジャパンが合意
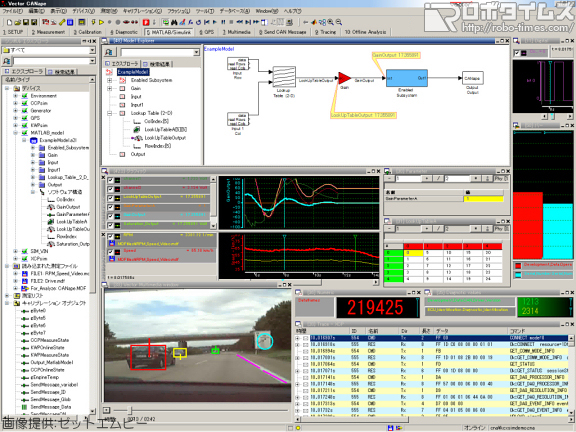
株式会社ゼットエムピーとベクター・ジャパン株式会社は5月18日、前者の電気自動車・カーロボティクス開発用の1/10スケールの「RoboCar」と、後者のECU(エンジンコントロールユニット)の適合(キャリブレーション)を行うツール「CANape」を、汎用的な測定適合プロトコル「XCP」で接続することに合意したことを発表した。
今回の合意によるメリットは、大きく3つ。まず、RoboCarにおけるACC(Adaptive Crouse COntrol)の開発が加速するという点だ。RoboCarはACCを持つロボットカーとして使用することが可能であり、CANapにはACCにおける測定とキャリブレーションが可能。実車での測定適合として実績のあるCANapをRoboCarに使用することで、実車なしの開発を実現することができ、ACCの開発を加速させることが可能となる。また、実車なしの教育や研修も行えるという効果も。
ふたつ目は、総合的な測定適合環境を実現できるので、ECUを視覚化できるということだ。CANapとRoboCarがXCPで接続することにより、RoboCarの各種センサや制御ソフトウェアの動作を視覚化することが可能となる。また、それらの動作を決定する定数を、CANapから変更することももちろん行える。
3つ目は、RoboCarから実車へのシームレスな開発の移行を実現できることだ。RoboCarの開発で使用したCANapを、実車開発で同じ開発環境として使用することができるのである。具体的には、RoboCarでの開発の際に得た測定データとの比較や、決定した制御の定数に移行などが可能となっている。
【関連記事】
・ゼットエムピーと日本ナショナルインスツルメンツ 提携で「RoboCar」の開発が「LabVIEW」上で可能に(2010年05月17日)