【CEATEC2011】連続自立歩行世界記録を達成した
あのロボットの秘密は実は足裏の形状ににあった
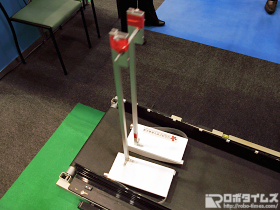
公立はこだて未来大学・複雑系知能学科教授の三上貞芳氏の研究室で開発された「受動歩行ロボット」は、2011年09月17日に、それまでのギネス世界記録だった13時間45分を大幅に更新する連続100時間の自立歩行を達成した。そのニュースをご存じの方も多いはずだが、今年のCEATECでロボタイムズが興味を持ったのは同大学のブースで展示されていたその受動歩行ロボットである。
受動歩行ロボットとは、振り子と同じ原理でモータなどの動力を使わずに、坂道などで足を重力の力だけで降り出す歩行機構を持ったロボットだ。動力を一切搭載していないため、下り坂でしか歩けない。そのため、ベルトコンベアも前方が下がったものを利用し、その上でひたすら歩き続ける。脚の長さは760mm、足のサイズは300mm、足幅は200mm弱(両足の端から端までで400mm)。重量は1.1kgだ。人やサーボモータなどの動力を搭載したロボットとは異なり、自力で歩いているわけではないため、疑問を持つ向きもあるだろう。しかし、逆をいえば坂道に限ってなら動力なしでも歩いていけるともいえるわけだ。
しかも、坂だからといって歩き続けるのは決して簡単ではなく、普通に平らな足裏だったら、ちょっとした凹凸や傾斜の違いなどでタイミングが簡単にずれてしまって、あっという間に止まってしまったり倒れてしまったりするのは当たり前だという。しかし、そうはならずに100時間も歩き続ける(実際には、どこかの可動部分の部品が摩耗ですり減って機能しなくなるまで歩き続けられるという)ことができるには足裏に秘密がある。

ヒントは、船舶の波や風邪の影響を受けて傾いたとしても、限界を超えてしまわない限りは自動的に復元して安定化する仕組みだ。起き上がりこぼしも同様で、船や起き上がりこぼしの底の形状が自然と安定させる条件を備えているから起きる現象なのである。こうした独りでに元に戻る回復力を持たせたのが受動歩行ロボットの足裏(右下)。外側の外と内と黒いラインが見えると思うが、それが設置する場所で外と内とで3次元的に形状が異なるのだ。ロボットが倒れそうになると、それを支える向きに自動的に力が発生するようになっており、それで右に左に揺れながら、前後の動きは振り子の原理で持って繰り出されて、ひたすら歩行していくというわけである。しかも、ベルトコンベア上だけでなく、凹凸の激しい通常の道路でも歩くことに成功したそうだ。
この原理を応用した安定化靴を製作して高齢者への実用化実験を行ったところ、非常に歩きやすいという評判を得たという。また、さらに今回の受動歩行ロボットの改良型も開発中とのことであった。